导语
中风康复中,上肢运动功能的恢复一直是一大难点。传统康复训练依赖治疗师一对一的辅助,效率有限且难以标准化;而现有的康复机器人虽能提供重复性训练,却往往缺乏“个性化”,无法适应每位患者独特的运动模式和恢复阶段。
如何让外骨骼机器人像治疗师一样“读懂”患者的运动意图,并提供恰到好处的辅助?清华大学自动化系李翔老师团队在机器人领域顶级期刊The International Journal of Robotics Research(IJRR)上发表的研究,给出了一个创新解决方案。
该团队提出了一种 “基于生成模型的双模式个性化上肢外骨骼机器人框架”,通过在线生成符合患者个体特征的运动轨迹,实现更安全、更有效的康复训练。研究中,NOKOV度量动作捕捉系统作为高精度运动数据采集的关键工具,健康侧上肢关节角度进行高精度测量,为个性化康复轨迹生成提供可靠的运动真值数据支撑。
一、研究背景:从“机械重复”到“因人而异”的康复转型,个性化康复为何成为关键问题
外骨骼机器人在辅助中风康复方面潜力巨大,但现有系统仍存在明显局限:
自由度不足,难以匹配人体上肢真实的复杂运动;
交互僵硬,无法根据患者实时状态调整辅助力度;
轨迹固定,缺乏对患者个体差异的响应。
为此,李翔老师团队研发了一款新型双模式个性化上肢外骨骼机器人,旨在通过在线生成个性化轨迹,提供个性化的中风康复训练支持,实现康复训练从“一刀切”到“量身定制”的转变。
二、方法框架:生成模型+双模式交互如何实现智能适应并驱动个性化康复
该研究的核心是一个基于生成模型的个性化框架,主要包括两个部分:
意图预测器:通过捕捉患者健康侧肢体的运动,推断其运动意图;
异常检测器:实时评估人机交互的安全性,确保运动自然且可靠。
两种模式:
主动镜像模式:辅助动作反映患者原始运动意图
被动跟随模式:辅助动作根据交互反馈个性化调整
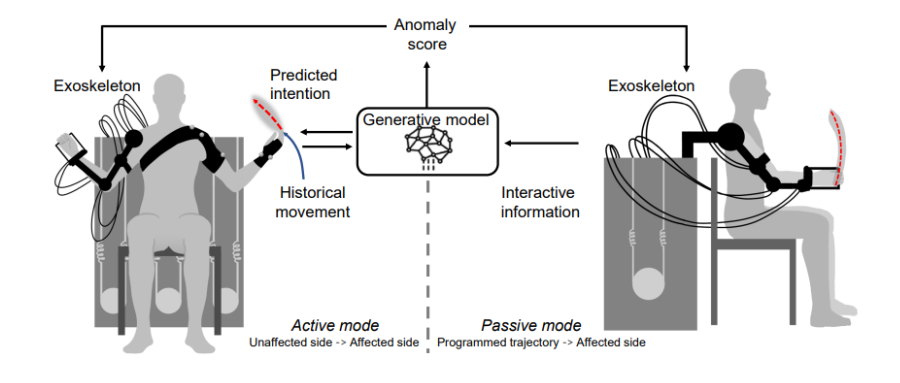
训练配置与基于生成模型的双模式交互总体框架示意
在此过程中,NOKOV度量动作捕捉系统 用于精准采集患者健康侧肢体的关节角度数据。这些高精度运动数据作为生成模型的输入,驱动机器人生成符合患者当前能力与意图的个性化参考轨迹。从更广泛的运动康复研究视角,高精度运动捕捉与运动分析技术成为连接人体运动机理与智能康复系统的重要基础工具。通过对人体关节角度、运动轨迹及协调模式的精确获取,研究人员能够更客观分析患者运动能力变化,并为康复机器人、外骨骼系统及训练策略的个性化设计提供量化依据。
三、系统设计:柔顺驱动 + 分层控制,保障人机安全交互
研究团队开发的上肢外骨骼机器人具有 6 个自由度,采用串联弹性驱动器(SEA) 与绳牵引驱动机制,在提供足够辅助力的同时,确保驱动柔顺、安全性高。
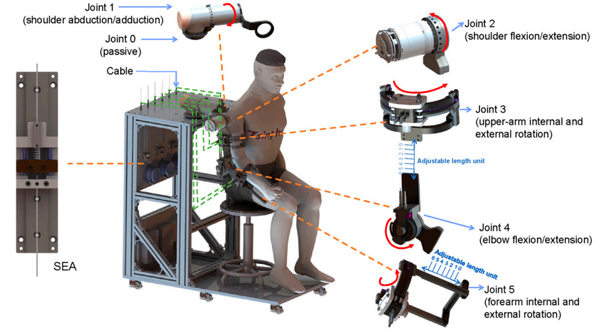
上肢外骨骼机器人的开发概述:该机器人由绳牵引驱动,包含五个主动关节(关节1至关节5)和一个被动关节(关节0)。红色箭头指示关节正向运动的方向。
系统采用分层控制架构:底层负责实时运动控制与反馈,高层在 PC 上运行运动规划与生成模型算法。NOKOV 动捕系统提供的高频、精准关节数据,成为连接人体运动意图与机器人智能决策的关键桥梁。
四、实验验证:主动镜像与被动跟随,均显个性化优势
为验证框架有效性,团队开展了两类实验:
1. 主动镜像训练实验:基于健康侧运动意图的轨迹生成与验证
主动镜像训练实验中,患者健康侧自由运动,NOKOV 动作捕捉系统实时捕捉其关节角度,并生成患侧的个性化跟随轨迹。
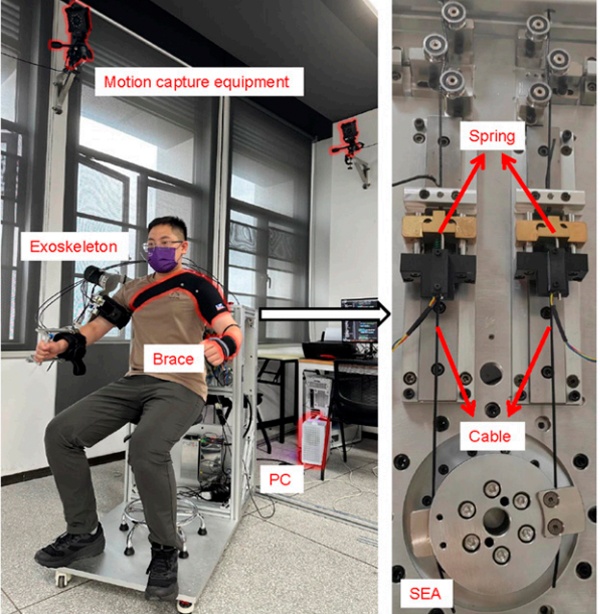
在主动镜像模式的实验设置中,使用了NOKOV度量动作捕捉系统来获取身体未受影响一侧的反馈。串联弹性驱动器(SEA)是通过用弹簧和钢缆连接电机输出端和关节末端构建的
实验包含外部冲击测试、异常区域识别等,结果显示系统能稳定跟踪意图、适应突发变化,并引导运动回归安全范围。
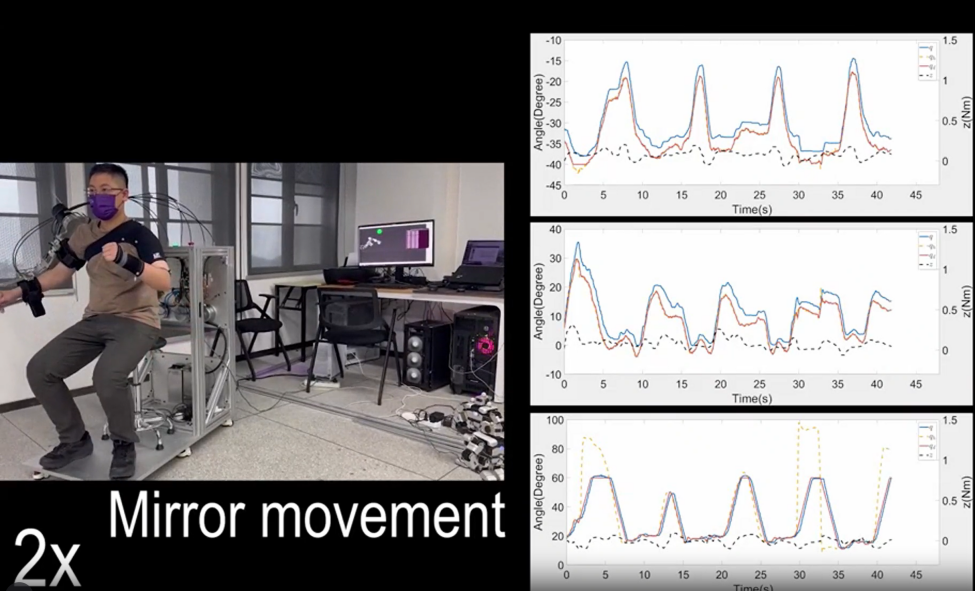
主动镜像训练实验结果表明,轨迹优化效果显著,实时性满足康复训练要求,人机交互稳定性良好
2.被动跟随训练实验:个性化辅助与临床康复效果评估
被动跟随训练实验则通过消融研究和临床测试,验证了个性化辅助的效果。

临床试验结果显示,本文提出的方法加速了运动功能的恢复,在肌肉张力水平和评分方面均有显著改善。
临床数据表明,采用该方法的患者肌肉张力显著降低、Fugl-Meyer(FMA)评分明显提高,运动功能恢复速度加快。
五、结论与展望:动作捕捉助力外骨骼机器人个性化康复基础设施
本研究通过生成模型与对健康人体运动数据的高精度动作捕捉实现了上肢外骨骼机器人个性化康复训练的安全性与有效性提升。
NOKOV度量动作捕捉系统为研究提供了高精度、低延迟的肢体关节数据,成为生成个性化参考轨迹与验证实验效果的工具。
未来,随着动作捕捉技术与智能康复算法的进一步融合,精准、安全、个性化的机器人辅助康复将更广泛应用于临床,惠及更多患者。
六、基于生成模型的上肢外骨骼康复机器人研究FAQ
Q1:该研究解决了上肢外骨骼机器人针对中风患者康复中的什么问题?
A:针对中风康复中上肢外骨骼机器人缺乏个性化的问题,提出双模式个性化框架,实现安全、个性化轨迹生成,提高康复训练有效性。
Q2:研究对康复机器人领域的意义?
A: 验证了生成模型与高精度动作捕捉结合的可行性,为外骨骼机器人个性化康复提供新思路,并为临床应用奠定基础。
Q3:为什么需要高精度动作捕捉?
A: 高精度动作捕捉获取健康侧肢体关节角度数据,为生成模型提供运动意图输入,保证个性化轨迹生成准确、安全。
七、论文信息与引用
标题:Upper-limb rehabilitation with a dual-mode individualized exoskeleton robot: A generative-model-based solution
期刊:The International Journal of Robotics Research(IJRR)
通讯作者:李翔,清华大学自动化系副教授、博士生导师
引用格式:
Chen Y, Miao S, Ye J, et al. Upper-limb rehabilitation with a dual-mode individualized exoskeleton robot: A generative-model-based solution. The International Journal of Robotics Research. 2025;0(0). doi:10.1177/02783649251333479



