近日,中山大学谭宁老师团队在机器人顶级期刊The International Journal of Robotics Research(IJRR) 发表最新研究成果,提出一种面向异构连续体机器人的行为预设自适应控制(BPAC)框架。该框架能够实现任务空间性能的预设控制,并在异构连续体机器人平台上展示了良好的适应性和鲁棒性。在该研究中,NOKOV度量动作捕捉系统为机器人平台实验实验提供了亚毫米级的真实位姿数据,作为控制器效果评估和视觉追踪系统精度验证的标准,助力验证控制方法有效性。
一、 研究背景:连续体机器人控制仍面临多项挑战
连续体机器人因其高柔性与高自由度,常用于医疗操作、复杂环境探测与柔性执行等多个领域。然而,现阶段控制研究仍面临多项挑战:
(1)异构连续体机器人的多样性为通用控制系统的开发带来了巨大挑战
(2)任务空间误差在扰动下难以保持稳定,真实位姿难以测量,精度验证依赖外部基准。现有控制方法难以实现期望的任务空间性能。
为解决这些问题,中大谭宁老师研究团队提出一种行为预定义自适应控制(BPAC)框架,旨在实现异构连续体机器人的任务空间运动学控制与视觉伺服。
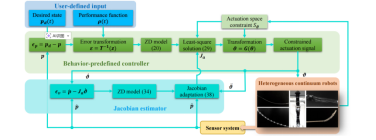
异构连续体机器人行为预定义自适应控制(BPAC)系统框图
二 、BPAC框架:任务性能可预设、误差可控、适配性强
该研究的核心贡献包括:
1. 预设行为控制器:通过误差转换与驱动空间变换,使用户能同时预设瞬态误差、稳态误差与收敛时间,并在驱动空间自由度冗余时规避空间限制,保证末端执行器任务完成。
2. 雅可比估计器:采用基于零化动力学的在线自适应律,实时估计机器人雅可比矩阵,无需依赖解析模型与运动学参数,是实现异构平台通用控制的关键。
3. 收敛性与鲁棒性改进:针对外部干扰下传统性能函数可能因误差越界导致控制器失效的问题,提出一种可重调性能函数(RePF),能动态调整性能边界,显著提升系统的鲁棒性。
三、NOKOV度量动作捕捉系统提供高精度、亚毫米级轨迹数据助力控制器性能验证实验
为验证预设行为自适应控制(BPAC)框架在实际系统中的性能,在五种异构连续体机器人平台上开展了实物实验:
绳驱连续体机器人:末端位置误差在预设时间内收敛至小于2毫米;RePF可在未知负载情况下调整性能边界,保证误差受控。
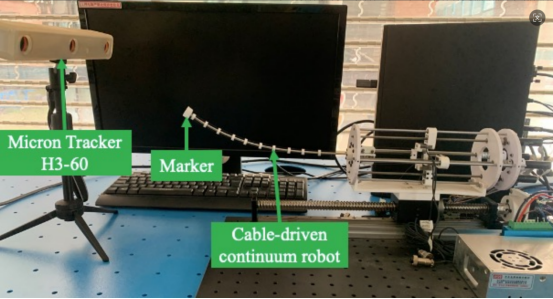
绳驱连续体机器人实验平台
并联连续体机器人:稳态误差小于1.5毫米,任务空间误差始终约束在预设边界内。
同心管机器人:外部干扰下RePF边界动态调整,误差最终收敛至零。
柔性内窥镜:成功完成激光引导视觉伺服任务,并在干扰下仍保证任务完成。
气动连续体机器人:即使原型存在固有抖动,RePF仍有效吸收未建模动态,实现稳定轨迹跟踪。
其中,NOKOV度量动作捕捉系统在绳驱连续体机器人实物实验中提供亚毫米级精度轨迹数据,用以分析误差,验证实验中视觉系统精度。
1. 高精度轨迹获取NOKOV度量动作捕捉系统提供亚毫米级位姿真值,用于误差分析与控制方法验证。
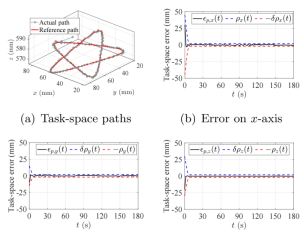
绳驱连续体机器人跟踪五角星路径的实验结果
2.交叉验证
与其他测量方法(如Micron Tracker)对比,平均误差约1.2毫米,确保实验数据可靠性。
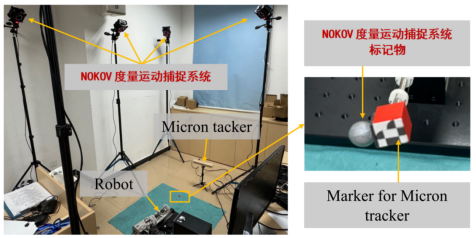
验证Micron Tracker H3-60精度的实验设置
在绳驱连续体机器人平台上,BPAC框架实现:
五角星路径的稳定轨迹跟踪
在预设时间内使任务误差收敛到目标范围
在额外负载干扰情况下仍能保持误差在可调性能边界之内
上述结果在部分对照实验中由 NOKOV度量动作捕捉系统提供的轨迹真值参与验证。
以上实物实验充分证明了BPAC框架在不同结构、不同驱动方式的连续体机器人上的通用性、精确性与鲁棒性。
四、BPAC推动连续体机器人控制进一步发展
中山大学团队提出的行为预设自适应控制方法,为连续体机器人控制提供了更强的性能可控性与跨平台适配性。在绳驱连续体机器人实物实验中,通过使用 NOKOV度量动作捕捉系统进行真值对照,提升了实验数据的可信度与控制器效果验证的严谨性。
五、动作捕捉系统在机器人高精度轨迹跟踪实验中的关键作用
研究团队选择NOKOV度量动作捕捉系统进行机器人轨迹跟踪用以分析误差,验证实验中视觉系统精度,因为NOKOV度量动作捕捉系统作为高精度光学动作捕捉系统
可提供亚毫米级精度位姿数据,满足高精度轨迹测量和控制器验证的需求。
可提供实时可靠的机器人位姿数据,用于误差分析和控制器性能评估。




