一、导语|双臂机器人抓取中的姿态估计如何验证?
在双臂机器人抓取任务中,被抓物体的姿态不确定性是制约精确操作的重要因素。日本大阪大学万伟伟老师团队在 IEEE Robotics and Automation Letters 发表研究,提出一种双臂重复抓取规划与控制方法,通过连续三次正交抓取主动降低物体姿态不确定性。
在实验验证阶段,研究团队引入 NOKOV度量动作捕捉系统,获取被抓取物体的高精度位姿真值数据,用于验证该方法在物体姿态估计与收敛方面的有效性。
二、研究背景|双臂机器人抓取面临的核心挑战
在机器人操作领域,精确抓取物体面临诸多挑战,其中最关键的问题来源于物体姿态的不确定性。
传统方法主要包括:
基于传感器的校正方法(依赖复杂标定与数据融合)
基于夹具约束的方法(需针对物体几何定制夹具,灵活性受限)
这些方法在双臂机器人灵活抓取场景中存在明显局限,灵活性较差。
三、双臂重复抓取规划方法概述
1.正交三元组重复抓取规划(Bimanual Regrasp Planning)
研究提出了一种双臂连续三次抓取规划方法。
首先利用抗对称抓取(antipodal grasp planning)生成候选抓取姿态,并根据夹爪开合方向将其分组,确保三次抓取动作在空间上相互正交。
通过这种方式,三次抓取共同约束物体的自由度,使物体姿态逐步收敛到唯一状态。
在该过程中,NOKOV度量动作捕捉系统用于记录每次抓取后物体的真实位姿变化。
2.阻抗控制应对物体姿态不确定性
针对物体初始姿态未知的问题,研究团队设计了阻抗控制方法(Admittance Control),利用机器人手腕的力/力矩传感器动态调整抓取姿态。
该方法能够在抓取过程中平衡接触反作用力,避免对物体施加过大载荷,同时适应姿态误差。
实验过程中,NOKOV度量动作捕捉系统持续输出物体高精度位姿数据,用于评估阻抗控制对姿态稳定性的影响。
四、验证实验
1.实验系统配置
实验对象为两种 L 形物体(方形与菱形截面),在随机初始姿态下完成三次连续抓取。
实验中,随机放置两种L形物体,双臂机器人第一次抓取时,确定物体的初始位置和姿态,为后续的抓取动作提供基础;第二次抓取,通过调整物体的一个自由度,逐步减少物体姿态的不确定性,并通过阻抗控制,动态调整抓取姿态,确保物体在新的姿态下被稳定抓取;第三次抓取,通过调整物体的剩余自由度,最终将物体精确地移动到目标位置,期间同样使用阻抗控制确保稳定抓取。
实验平台包括:
带有光学标记的目标物体
用于全局参考的标记
NOKOV度量动作捕捉系统,用于检测反光标记并输出物体的三维位姿真值该系统为双臂机器人抓取实验提供了高精度姿态参考基准。
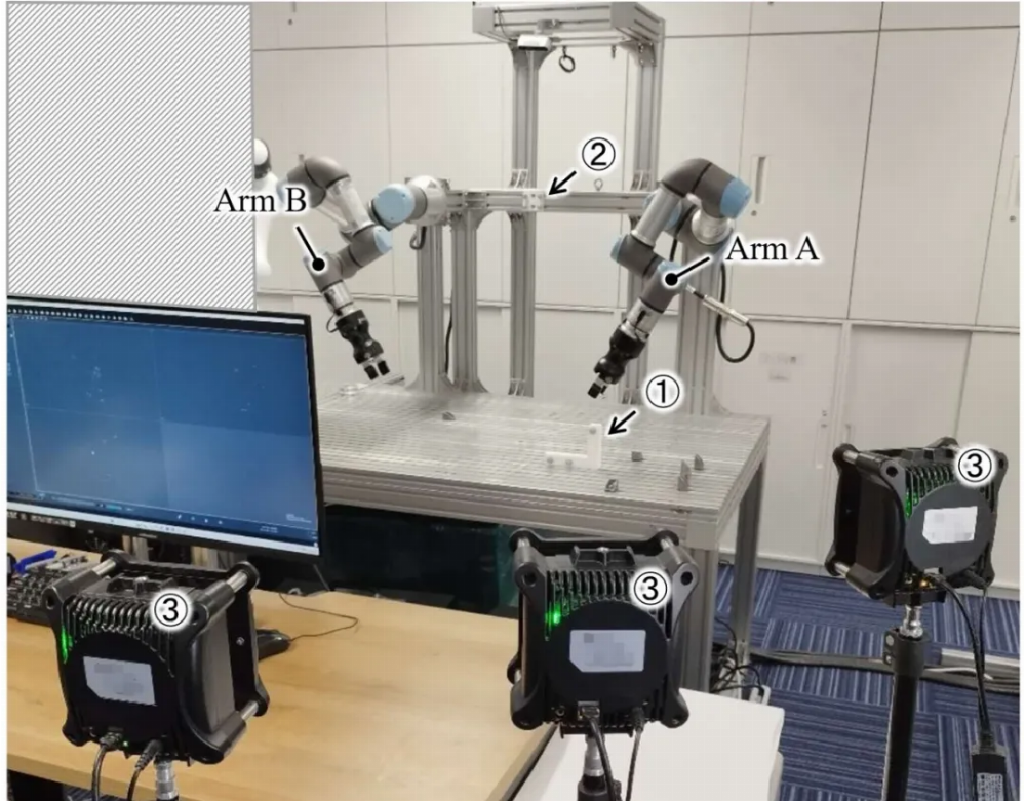
实验中使用的双臂平台。① 带有光学标记的目标物体 ② 用于全局参考的标记 ③用于检测反光标记点的NOKOV度量动作捕捉系统
2.实验结果:与动作捕捉真值对比验证
实验结果显示,尽管绝对位置和旋转误差存在,但误差水平与 NOKOV度量动作捕捉系统测得的真值数据处于同一数量级。
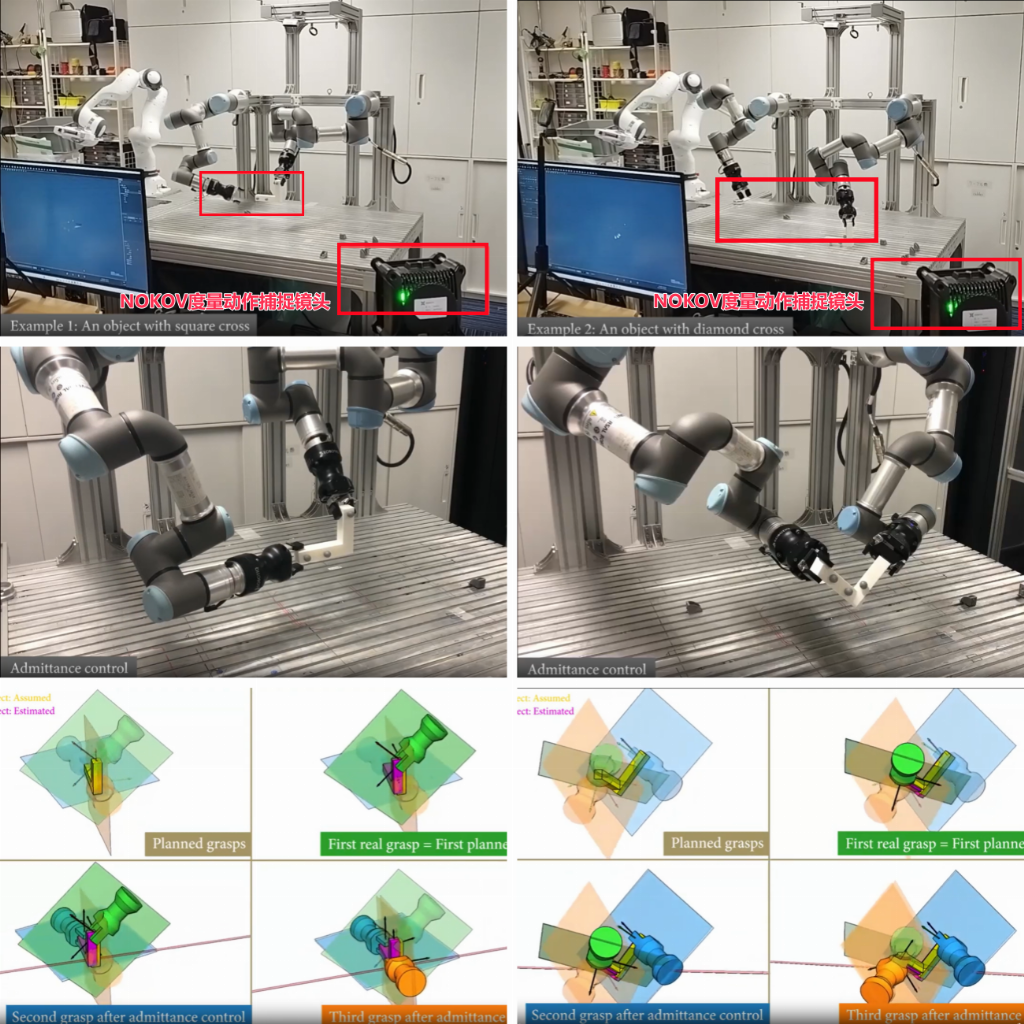
左侧为方形截面L 形物体抓取实验;右侧为菱形截面L 形物体抓取实验
实验视频数据表明,三次连续抓取过程中,方法估计的位姿与动作捕捉真值的误差偏差小于 0.5 mm,验证了该方法在降低物体姿态不确定性方面的有效性和重复性。
五、结论|双臂重复抓取规划结合阻抗控制可有效降低物体姿态不确定性
该研究表明,双臂重复抓取规划结合阻抗控制能够在无需外部相机或夹具的情况下,有效降低物体姿态不确定性。
同时,NOKOV度量动作捕捉系统为双臂机器人抓取与物体姿态估计研究提供了可靠的位姿真值验证手段,是机器人操作算法实验验证中的关键工具。
六、双臂机器人重复抓取降低物体姿态不确定性研究FAQ
Q1:该研究中双臂机器人如何降低被抓物体的姿态不确定性?
A1:该研究提出一种双臂重复抓取规划方法,通过三次空间上相互正交的抓取动作,逐步约束物体的自由度,使物体姿态从不确定状态收敛到唯一解,从而有效降低被抓物体的姿态不确定性。
Q2:双臂机器人抓取过程中如何应对物体初始姿态未知的问题?
A2:研究中采用阻抗控制方法,使机器人在抓取过程中根据力/力矩反馈动态调整抓取姿态,从而适应物体的实际姿态变化,避免过大接触力,并提升抓取稳定性。
Q3:机器人抓取中的物体姿态估计是如何进行实验验证的?
A3:实验通过引入NOKOV度量动作捕捉系统获取被抓物体的高精度三维位姿真值数据,并与重复抓取方法估计的姿态结果进行对比,从而验证算法在降低姿态不确定性方面的有效性。
Q4:为什么需要使用动作捕捉系统验证机器人抓取算法?
A4:动作捕捉系统能够提供独立于机器人自身传感器的高精度位姿真值。在该研究中,NOKOV度量动作捕捉系统用于评估双臂抓取过程中物体姿态变化,为算法性能提供可靠的定量验证依据。
Q5:双臂重复抓取方法对机器人应用有什么意义?这种方法适用于哪些机器人抓取研究或应用场景?
A5:该方法无需外部相机或定制夹具,即可在抓取过程中主动减少物体姿态不确定性,提高机器人在复杂、未知场景下执行精确操作的灵活性和适用性。适用于双臂协作抓取、复杂形状物体操作、需要高姿态精度的机器人装配与操作研究。
七、参考文献与作者介绍
引用格式
Nagahama, Ryuta, Weiwei Wan, Zhengtao Hu, and Kensuke Harada. “Bimanual Regrasp Planning and Control for Active Reduction of Object Pose Uncertainty.” arXiv preprint arXiv:2503.22240 (2025).
通讯作者简介
万伟伟,日本大阪大学基础工学院长聘副教授,大阪大学共生智能系统研究中心研究员,日本理化研究所(BIKEN)外来研究员。主持开发WRS开源机器人规划控制系统,发表论文200余篇,拥有日本发明专利6项,担任智能机器人领域国际顶级期刊TRO、IJRR、RAL等的副主编以及数个国际期刊杂志的编委,参与主办或协办IEEE ICRA、IROS、ROBIO、ARM、ICCRE等机器人领域国际会议。



